
python实现的基于k-NN的人脸识别算法
摘 要
在信息化高速发展的今天,人们对于一个快速的身分验证方法的需求越来越广泛,从智能手机到门禁,人脸识别似乎成为了一个快速且行之有效的认真途径。本文尝试实现一个基于 k-NN 的人脸识别算法,并从中一窥现代人脸识别技术的完整面貌。
1 综述
1.1 数据集
本实验的数据集采用了剑桥大学 Olivetti Research 实验室 1992 年 4 月到 1994 年 4 月摄制的人脸照片。数据集包含 40 个不同的对象,每一个对象 10 张不同的人脸照片。所有的照片都是在黑暗的背景下拍摄的,同一个对象的照片有些许不同,包括一些光照的不同以及面表情和面部细节的不同。所有的文件都是 pgm 格式的,便于读取。同一个对象的照片存于同一个文件夹中,编号 s1~s40,同一个对象的不同照片分别编号为 1.pgm~10.pgm。
1.2 算法
在本实验中,主要采用了 k-NN 算法对于人脸进行归类识别,并辅以其他的算法来检测识别的性能。k-NN 算法的过程如下:
-
遍历训练数据集,计算预测样本与其他每一个样本点的距离,按照由近到远排序;常用距离有曼哈顿距离、欧式距离和闵可夫斯基距离
-
需要预先定义一个超参数参数 k 值,k 是一个大于或等于 1 的整数,表示纳入投票决策的样本数
-
统计离预测样本最近的 k 个样本,统计各个分类数目,返回数量最多的类的标签作为预测值
使用数学语言描述如下:
输入 :训练数据集

其中,xi ∈ X ⊆ Rn 为实例的特征向量,yi ∈ Y = {c1,c2,...,ck} 为实例的类别,i = 1,2,...,N; 实例特征向量 x;
输出 : 实例 x 所属的类 y
-
根据给点的距离度量,在训练集 T 中找出与 x 最近邻的 k 个点,涵盖着 k 个点的领域,记为 Nk(x)
-
在 Nk(x) 中根据分类决策规则 (如多数表决),决定 x 的类别 y:

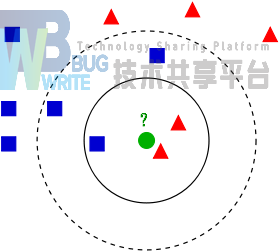
如下图所示,如果 k=3,则离绿球最近的三个样本中,三角形最多(2 个),这时预测标签会返回三角形,如果 k=5,那么正方形有 3 个,这时结果就变成了正方形。k 值的选取,需要对通过目标的理解,尝试等方式确定。
2 数据预处理
预处理是人脸识别过程中的一个重要环节。输入图像由于图像采集环境的不同,如光照明暗程度以及设备性能的优劣等,往往存在有噪声,对比度不够等缺点。另外,距离远近,焦距大小等又使得人脸在整幅图像中间的大小和位置不确定。为了保证人脸图像中人脸大小,位置以及人脸图像质量的一致性,必须对图像进行预处理。
人脸图像的预处理主要包括人脸扶正,人脸图像的增强,以及归一化等工作。人脸扶正是为了得到人脸位置端正的人脸图像;图像增强是为了改善人脸图像的质量,不仅在视觉上更加清晰图像,而且使图像更利于计算机的处理与识别。归一化工作的目标是取得尺寸一致,灰度取值范围相同的标准化人脸图像。以下是本实验尝试过的预处理方法:
-
直方图均衡 :直方图是一种点操作,它逐点改变图像的灰度值,尽量使各个灰度级别都具有相同的数量的像素点,使直方图趋于平衡。直方图均衡可以使输入图像转换为在每一个灰度级上都有相同像素点数的输出图像(即输出的直方图是平的)。这对于图像比较或分割是十分有用的。
-
中值滤波 :无论是直接获取的灰度图像,还是由彩色图像转换得到的灰度图像,里面都有噪声的存在,噪声对图像质量有很大的影响。进行中值滤波不仅可以去除孤点噪声,而且可以保持图像的边缘特性,不会使图像产生显著的模糊,比较适合于实验中的人脸图像。
然而由于本实验是基于 k-NN 算法的,其本质是计算图像每个对应点的距离和,因此使用这些提取特征和消去噪声的方法不一定对于算法的结果产生正面的影响。在实验中发现,不进行任何预处理的效果实际上是最好的。推测是由于原图片已经是在控制了较多变量环境下拍摄,已经保留了必要的信息而额外信息很少,经过这些预处理后反而有一定的信息损失而导致识别率降低。
3 人脸识别算法实现
采用基于 k-NN 算法的人脸识别算法流程图如下图所示。首先将训练数据加入训练数据集中,此处将每一个对象的输入数据分为训练数据和测试数据,而仅将训练数据预处理后加入数据集中。接下来直接执行 k-NN 算法,将测试数据与每一个训练数据集中的数据进行比对,并取前 k 个数据对应的标签中出现次数最多的作为测试数据的标签。

其中,在对于测试数据与训练数据的距离进行计算时,有多种计算方法,常用的计算方法有三种,分别为曼哈顿距离、欧氏距离和闵可夫斯基距离。其中,曼哈顿距离与欧氏距离均为闵可夫斯基距离的特例。
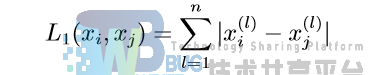
设特征空间 X 是 n 维实数向量空间

的 Lp 距离定义为:

当 p =1 时,称为曼哈顿距离:
当 p =2 时,称为欧式距离:

当 p =∞ 时,它是各个坐标距离的最大值:

此外,还有余弦距离、Jaccard 相似系数等多种距离的计算方法。而为了便于实现,同时考虑到效果,性能方面的原因,在本实现中采用了欧拉距离作为最终的距离计算方法。
为了便于取前 k 个距离,维护一个小根堆,在每次进行距离计算时将距离以及标签插入小根堆中,并在最后从小根堆的堆顶弹出 k 个数据。
4 算法测试
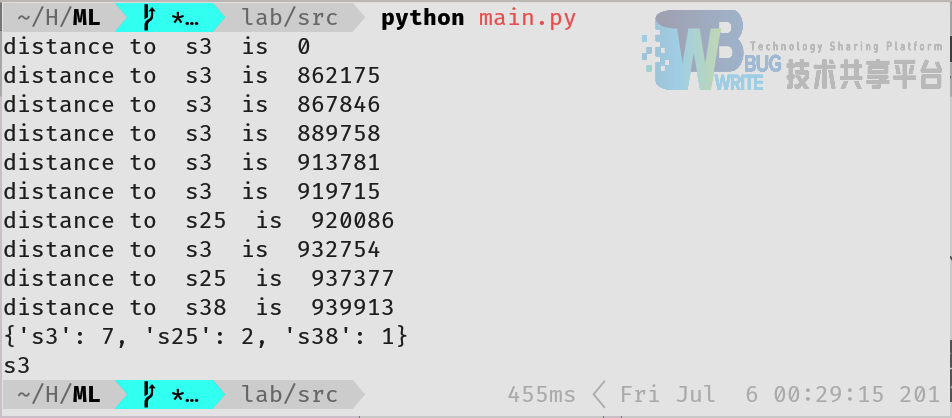
对于单个图像进行测试,此处取 k-NN 参数 k = 10,并将测试数据也加入训练集中,以验证程序功能上的正确性:此时测试图片与自身计算距离应为 0,并且自身应为与自身距离最近的图片。其他的 9 张图片应该按照距离以降序排序。将所有的距离与匹配的标签个数输出后如图3所示。从图中可以初步判断程序的功能正常。此处,以 s3/1.pgm 为例进行测试,与其距离最近的图片是自身,随后是 6 个标签为 s3 的照片,然后是 2 个标签为 s25 的照片和 1 个标签为 s38 的照片。
5 结果分析与评估
5.1 评估方法
由于原始数据每一个人脸均有 10 张不同角度的照片,为了能够更好的利用数据,从有限的学习数据中获取尽可能多的有效信息,决定采用 k 折交叉验证的方式:在给定的样本空间中,拿出大部分样本作为训练集来训练模型,剩余的小部分样本使用刚建立的模型进行预测,并求这小部分样本的预测误差或者预测精度,同时记录它们的平均值。
交叉验证从多个方向开始学习样本的,可以有效的避免陷入局部最小值,同时,可以在一定程度上避免过拟合问题。
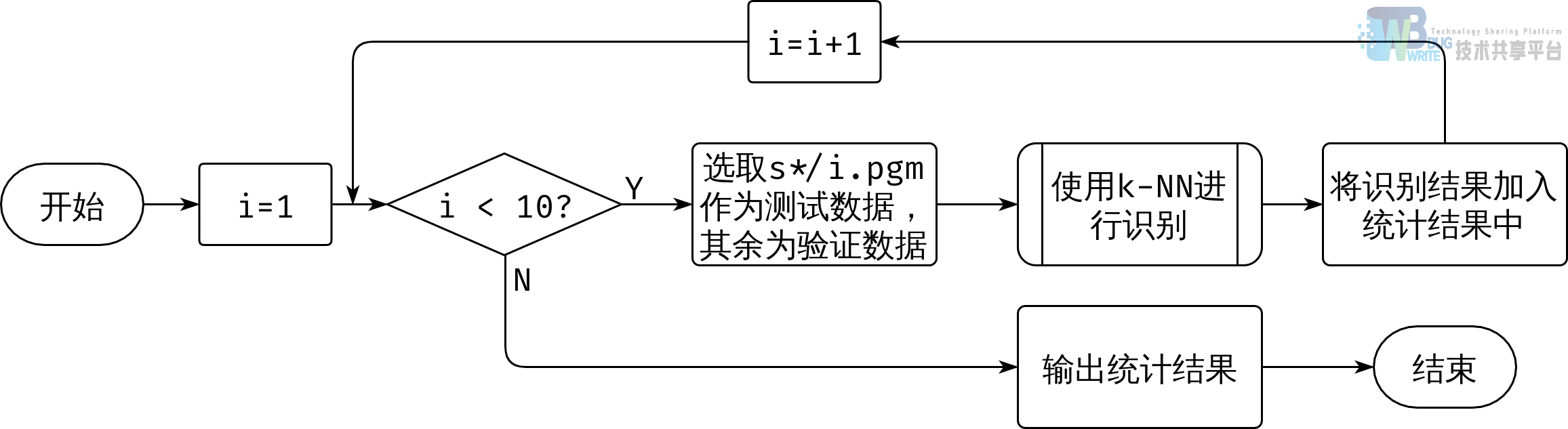
在本实验中,最终采用的 k 验证方法如图4所示。在每一次循环中采用具有循环编号的图片作为测试数据,其余为训练数据,使用图2中的流程进行识别后将识别结果(是否正确)加入统计结果中。最后,输出统计结果。
5.2 评估结果
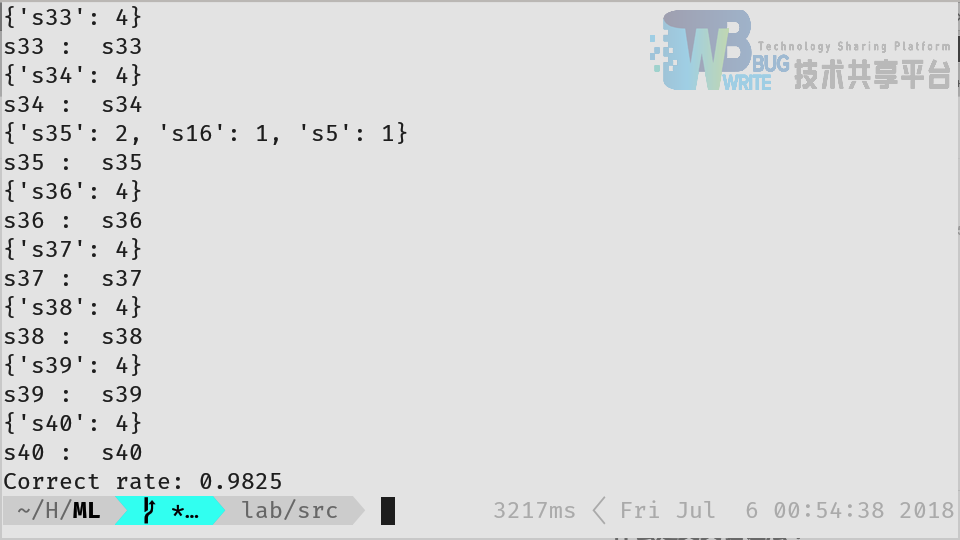
取 k=3, 一测试的输出如图5所示,从图中可以看出, 识别的准确率为 98.25%。
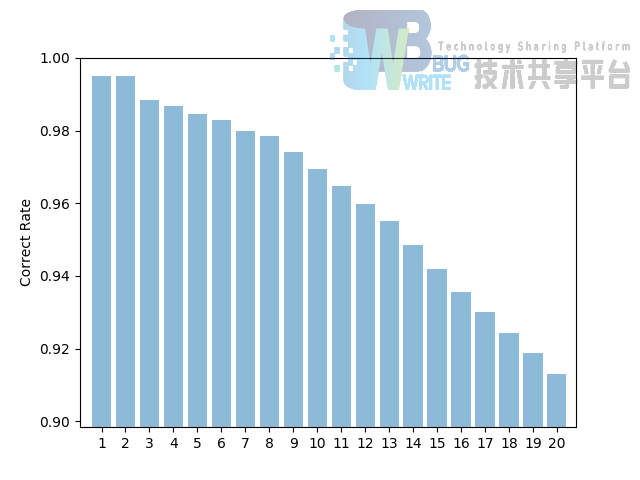
就算法的结果来看,算法的性能还是较为不错的,对于 k 为其他值时,准确率如图6所示。图为对于 k =1~k =20 的测试结果从图中可以看出,程序的正确率随着 k 的值上升而下降。这一结果是不具有普遍性的,但是对于本程序而言,选取一个较小的值对于测试结果有着正面的影响,在交叉验证下最高正确率可达 99.5%。
6 结语
此次实验基于 k-NN 算法实现了一个人脸识别,并达到了较高的准确率。k-NN 是机器学习领域中一个十分基础的算法,然而此次实验表明它依然是一种行之有效的算法。对于 40 个对象的人脸识别准确率甚至达到了 99.5%。然而值得注意的是,这是基于输入数据是一个经过良好处理的数据集这一前提的。在实际的应用过程中,输出数据没用如此强的一致性,因此需要结合 PCA、神经网络等算法来达到更好的效果。
此外,这一实验也说明了预处理方法的重要性,对于本实验而言,最好的预处理方法是不进行任何预处理,而在其他的情况下,预处理是十分重要且必不可少的。对于图片的预处理能够极大地影响人脸识别的结果。
参考文献
- 基于深度学习的人脸识别研究及其实现(南京理工大学·郑大刚)
- 基于深度学习的多任务人脸识别系统研究(齐鲁工业大学·张子振)
- 移动人脸识别系统的研究与实现(北京邮电大学·王远)
- 基于人脸识别技术的人证合一系统(北方工业大学·王祺)
- 基于注意力机制的口罩遮挡人脸检测与识别方法研究(华南理工大学·蔡紹鵬)
- 面向风格变化的人脸识别系统设计与实现(武汉轻工大学·詹鹏程)
- 基于ARM的人脸识别智能视频监控系统的设计与实现(哈尔滨理工大学·朱雨佳)
- 视频中人脸表情识别关键技术与应用(电子科技大学·黄弋)
- 基于稀疏表示的人脸识别算法研究与应用(湖南大学·张灿辉)
- 基于人脸识别的摄影协会综合管理系统设计与实现(哈尔滨工程大学·李世强)
- 基于人脸识别的摄影协会综合管理系统设计与实现(哈尔滨工程大学·李世强)
- 基于人脸聚类的图片管理系统的设计与实现(首都经济贸易大学·王子涛)
- 基于人脸聚类的图片管理系统的设计与实现(首都经济贸易大学·王子涛)
- 编辑鲁棒的人脸识别系统的设计与实现(北京邮电大学·沈昕屹)
- 基于嵌入式人脸识别的门禁设计(大连交通大学·何玉婷)
本文内容包括但不限于文字、数据、图表及超链接等)均来源于该信息及资料的相关主题。发布者:代码货栈 ,原文地址:https://bishedaima.com/yuanma/35476.html









